
Page 27 - วิศวกรรมสาร ปีที่ 77 ฉบับที่ 2 เมษายน - มิถุนายน 2567
P. 27
การใช้ภาพถ่ายดาวเทียมในการประเมินพื้นที่เพาะปลูกอ้อย
ต้นไม้ตัดสินใจจะจัดกลุ่มข้อมูลโดยเริ่มจากด้านบนสู่ด้านล่าง
ในลักษณะ top-to-down การประมวลผลเริ่มจากการน�าข้อมูลน�าเข้า
(input data) จัดไว้ชั้นแรก (โนดที่ 1) จากนั้นใช้ค่าเกนความรู้
(information gain) ในการจัดกลุ่มให้กับข้อมูลภายในโนด ตัวแบ่ง
กระบวนการเรียนรู้ของข่ายประสาทเทียมจะใช้การแพร่กระจาย (threshold) ค�านวณจากชุดข้อมูลที่มีค่าเกนมากที่สุด การใช้ค่า
ย้อนกลับเพื่อหาอัตราการเปลี่ยนแปลงของค่าน�้าหนักในโครงข่าย เกนความรู้ที่เหมาะสม จ�าเป็นต้องพิจารณาจากค่าความไม่บริสุทธิ์
เทียบกับค่าฟังก์ชันต้นทุนโดยปรับค่าน�้าหนักของข้อมูลในทุกชั้น (impurity) ซึ่งควรมีค่าน้อยที่สุด โดยค�านวณจากค่าเอนโทรปี
ย้อนกลับไปจนถึงชั้นแรกสุดก่อนส่งข้อมูลน�าเข้าชุดต่อไปเข้าสู่โครง (entropy) ของต้นไม้ตัดสินใจที่มีผลลัพธ์จากค่าตรรกะ (Boolean)
ข่ายอีกครั้งและท�าซ�้ากระบวนการเดิมไปเรื่อย ๆ จนค่าฟังก์ชัน (สมการที่ 1) ซึ่งเปรียบเสมือนค่าฟังก์ชันต้นทุน (cost function)
ต้นทุนลู่เข้า global optima (Sharma et al., 2013) แสดงดังสมการที่ 2
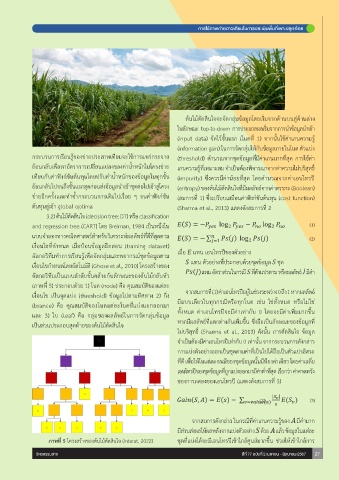
3.2) ต้นไม้ตัดสินใจ (decision tree: DT) หรือ classification
and regression tree (CART) โดย Breiman, 1984 เป็นหนึ่งใน
แบบจ�าลองทางคณิตศาสตร์ส�าหรับวิเคราะห์ผลลัพธ์ที่ดีที่สุดตาม
เงื่อนไขที่ก�าหนด เมื่อป้อนข้อมูลฝึกสอน (training dataset)
อัลกอริทึมท�าการเรียนรู้เพื่อจัดกลุ่มและพยากรณ์ชุดข้อมูลตาม เมื่อ แทน เอนโทรปีของตัวอย่าง
เงื่อนไขก�าหนดโดยอัตโนมัติ (Ghose et al,, 2010) โครงสร้างของ แทน ตัวอย่างที่ประกอบด้วยชุดข้อมูล ชุด
อัลกอริทึมเป็นแบบล�าดับขั้นคล้ายกับลักษณะของต้นไม้กลับหัว แทน อัตราส่วนในกรณี ที่ตัวแปรตาม หรือผลลัพธ์ มีค่า
(ภาพที่ 5) ประกอบด้วย 1) โนด (node) คือ คุณสมบัติของแต่ละ
เงื่อนไข เป็นจุดแบ่ง (threshold) ข้อมูลไปตามทิศทาง 2) กิ่ง จากสมการที่ (1) ค่าเอนโทรปีอยู่ในช่วงระหว่าง 0 ถึง 1 หากผลลัพธ์
(brance) คือ คุณสมบัติของโนดแต่ละโนดที่แบ่งแยกออกมา มีแบบเดียวในทุกกรณีหรือทุกโนด เช่น ใช่ทั้งหมด หรือไม่ใช่
และ 3) ใบ (leaf) คือ กลุ่มของผลลัพธ์ในการจัดกลุ่มข้อมูล ทั้งหมด ค่าเอนโทรปีจะมีค่าเท่ากับ 0 โดยจะมีค่าเพิ่มมากขึ้น
เป็นส่วนประกอบสุดท้ายของต้นไม้ตัดสินใจ หากมีผลลัพธ์ที่แตกต่างกันเพิ่มขึ้น ซึ่งถือเป็นลักษณะของข้อมูลที่
ไม่บริสุทธิ์ (Sharma et al., 2013) ดังนั้น การตัดสินใจ ข้อมูล
จ�าเป็นต้องมีค่าเอนโทรปีเท่ากับ 0 เท่านั้น จากกระบวนการดังกล่าว
การแบ่งตัวอย่างออกเป็นชุดตามค่าที่เป็นไปได้ถือเป็นตัวแปรอิสระ
ที่ดี เพื่อให้ในแต่ละกรณีของชุดข้อมูลนั้นมีพียงค่าเดียว โดยค่าเฉลี่ย
เอนโทรปีของชุดข้อมูลที่ถูกแบ่งออกมามีค่าต�่าที่สุด เรียกว่า ค่าคาดหวัง
ของการลดลงของเอนโทรปี (แสดงดังสมการที่ 3)
( 3 )
จากสมการดังกล่าว ในกรณีที่ค่าเกนความรู้ของ มีค่ามาก
มีส่วนส่งผลให้ผลหลังจากแบ่งตัวอย่าง ด้วย แล้ว ข้อมูลในแต่ละ
ภาพที่ 5 โครงสร้างของต้นไม้ตัดสินใจ (Intarat, 2022) ชุดที่แบ่งได้จะมีเอนโทรปีเข้าใกล้ศูนย์มากขึ้น ช่วยให้เข้าใกล้การ
วิศวกรรมสาร ปีที่ 77 ฉบับที่ 2 เมษายน - มิถุนายน 2567 27